Projects
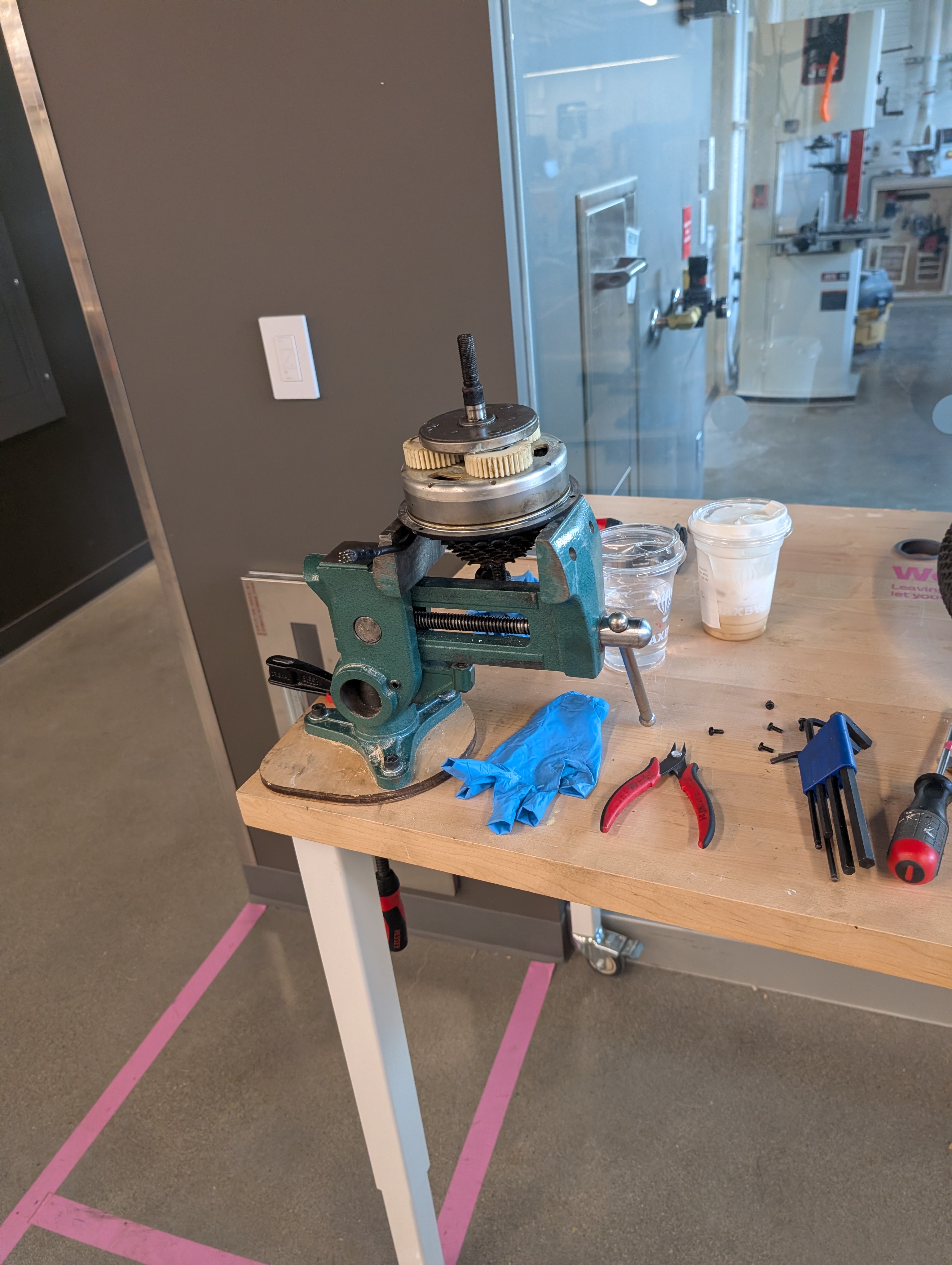
E-Bike Motor Teardown & Replacement
Full teardown, diagnosis, and motor replacement on a Totem Volcano electric mountain bike. Hands-on work with hub motor internals, hall sensors, and controller wiring.
Click to expand →
Raspberry Pi Steering Wheel Controller
GPIO-based button controller on a CM5, broadcasting inputs over CAN bus and Unix domain sockets to a Qt receiver. Poll-based event loop architecture.
Click to expand →

MBTA Transit Map LED Display
ESP32-driven WS2812B strip addressing ~350 individually controlled LEDs representing real-time MBTA transit lines across a physical map.
Click to expand →Rack & Pinion TicTac Dispenser
3D-printed servo-driven dispenser designed in SolidWorks. Module 2.0 gear geometry with calculated pitch diameter and backlash compensation.
Click to expand →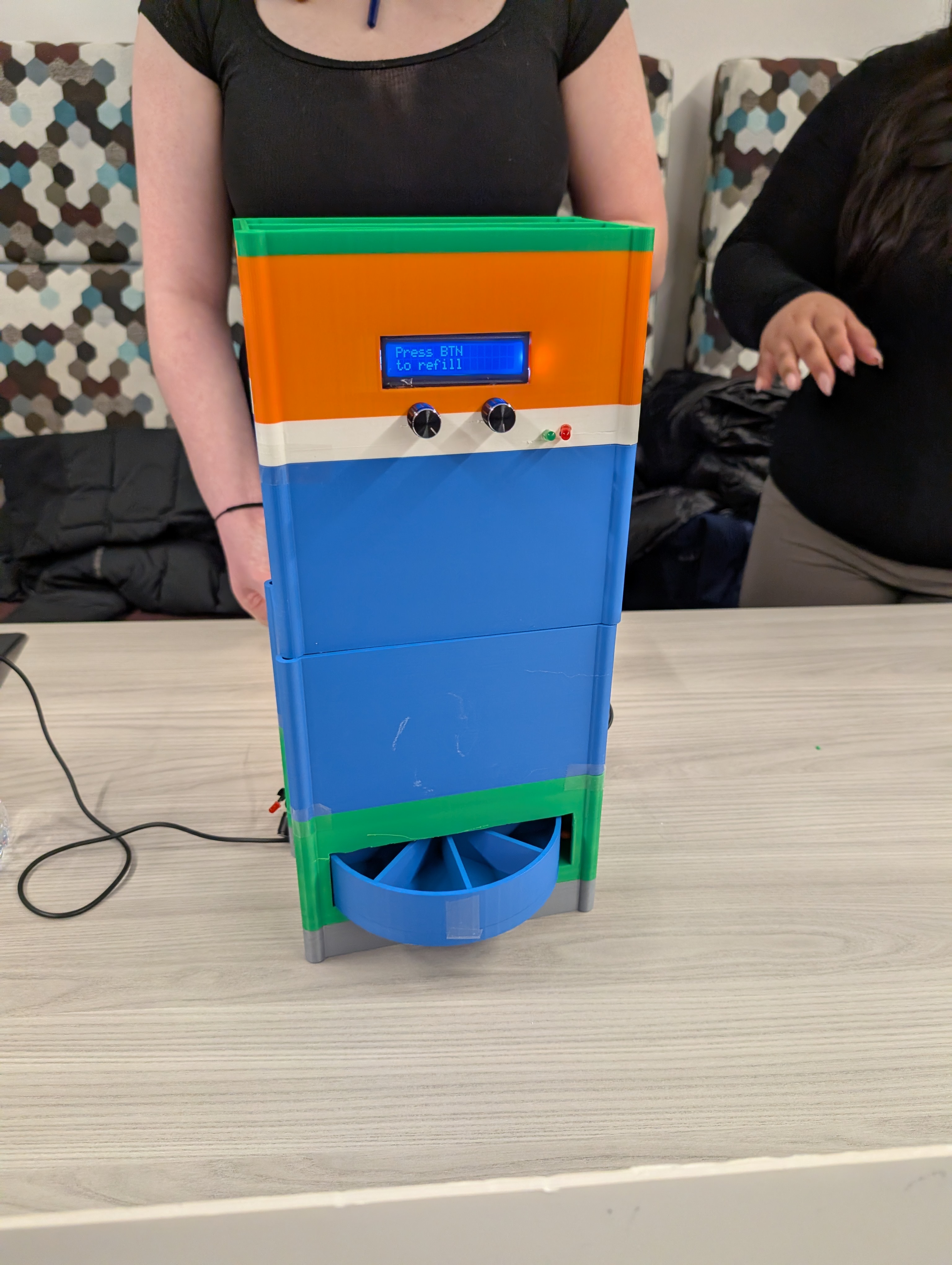
Automated Plant Watering System
Arduino Nano system with RTC scheduling, OLED display, soil moisture sensing, and MOSFET-controlled pump. Optimized to fit within Nano's RAM constraints.
Click to expand →
Shoe & Sock Detection System
YOLO-based computer vision pipeline using Roboflow API on a Raspberry Pi for real-time footwear classification and detection.
Click to expand →
Spider Robot Motor Control
ARM/FPGA-based motor controller for a Terasic Spider Robot. C++ SpiderLeg class with register-level servo control on DE1-SoC hardware.
Click to expand →Smart Peephole Camera
Raspberry Pi Zero W2 with PiCamera streaming a live MJPEG feed through a Flask server, accessible remotely via secure Cloudflare Tunnel.
Click to expand →Roller Coaster Safety Simulation
Interactive engineering failure mystery for 5th graders using an ESP32, IR and ultrasonic sensors, and a laser-cut track with multi-station puzzle gameplay.
Click to expand →Welded Knee Hockey Net
Custom knee hockey net built from welded metal tubing with bent skid bars, designed from scratch and fabricated by hand.
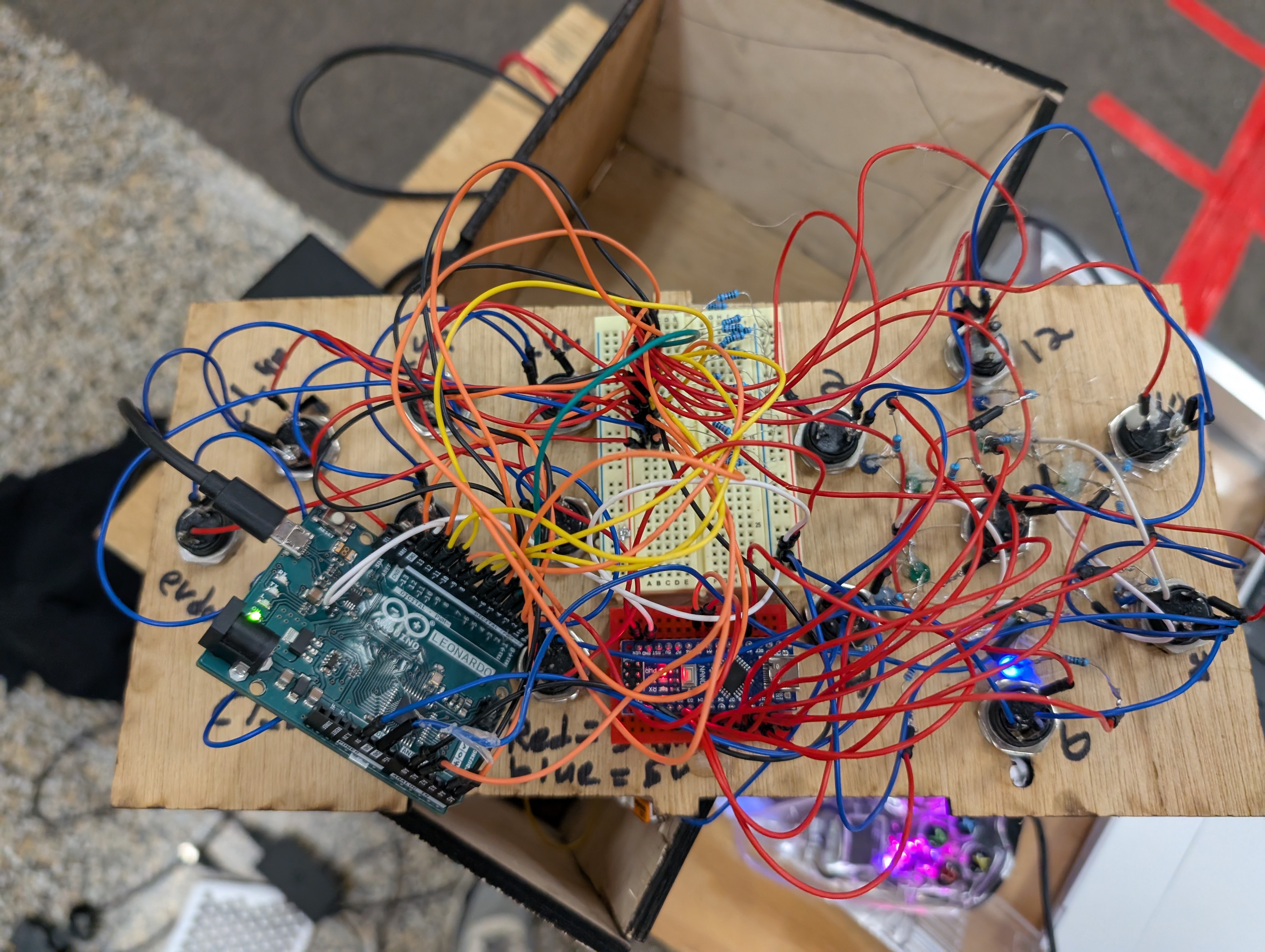
Click to expand →FRC Button Box Controller
Custom Arduino-based HID controller for FRC Reefscape, designed to give the operator dedicated physical buttons for precise robot mechanism control during competition.
Click to expand →